Solving Systems of Linear Equations#
Matrices provide a compact way to solve multiple equations at once. Instead of solving equations one by one, we can solve them all together using matrix operations.
The Problem#
Suppose you have a system of linear equations:
We can write this as a matrix equation:
Where:
import numpy as np
import matplotlib.pyplot as plt
Solving with NumPy#
NumPy provides np.linalg.solve() to solve \(A\mathbf{x} = \mathbf{b}\):
# Define the system
A = np.array([[2, 3],
[1, -1]])
b = np.array([8, 1])
# Solve for x
x = np.linalg.solve(A, b)
print(f"Solution: x = {x[0]:.2f}, y = {x[1]:.2f}")
# Verify the solution
print(f"\nVerification:")
print(f"2({x[0]:.2f}) + 3({x[1]:.2f}) = {2*x[0] + 3*x[1]:.2f} (should be 8)")
print(f"({x[0]:.2f}) - ({x[1]:.2f}) = {x[0] - x[1]:.2f} (should be 1)")
Solution: x = 2.20, y = 1.20
Verification:
2(2.20) + 3(1.20) = 8.00 (should be 8)
(2.20) - (1.20) = 1.00 (should be 1)
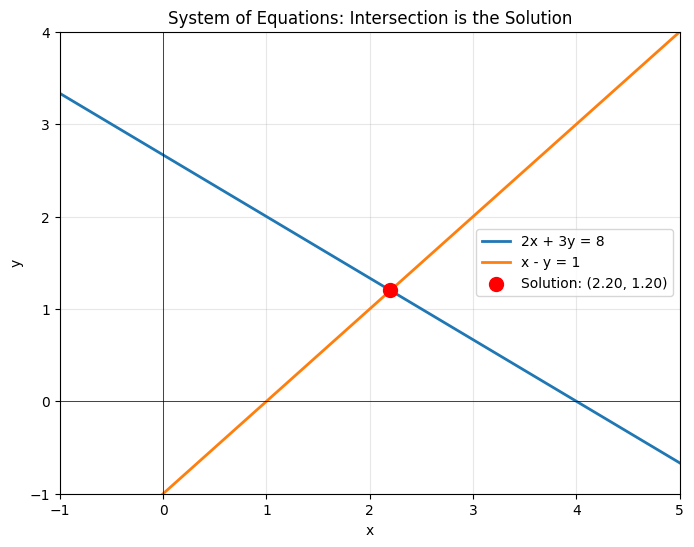
Geometric Interpretation#
Each equation represents a line. The solution is where the lines intersect:
# Plot the two equations as lines
x_vals = np.linspace(-2, 6, 100)
# 2x + 3y = 8 => y = (8 - 2x) / 3
y1 = (8 - 2*x_vals) / 3
# x - y = 1 => y = x - 1
y2 = x_vals - 1
plt.figure(figsize=(8, 6))
plt.plot(x_vals, y1, label='2x + 3y = 8', linewidth=2)
plt.plot(x_vals, y2, label='x - y = 1', linewidth=2)
plt.scatter(x[0], x[1], color='red', s=100, zorder=5,
label=f'Solution: ({x[0]:.2f}, {x[1]:.2f})')
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True, alpha=0.3)
plt.axhline(0, color='black', linewidth=0.5)
plt.axvline(0, color='black', linewidth=0.5)
plt.legend()
plt.title('System of Equations: Intersection is the Solution')
plt.xlim(-1, 5)
plt.ylim(-1, 4)
plt.show()
Larger Systems#
The same approach works for larger systems. Let’s solve a 3x3 system:
A = np.array([[1, 2, 1],
[2, 1, -1],
[1, -1, 2]])
b = np.array([6, 3, 5])
x = np.linalg.solve(A, b)
print(f"Solution: x = {x[0]:.2f}, y = {x[1]:.2f}, z = {x[2]:.2f}")
# Verify
print(f"\nVerification: A @ x = {A @ x}")
print(f"Should equal b = {b}")
print(f"Difference: {np.linalg.norm(A @ x - b):.2e}")
Solution: x = 2.00, y = 1.00, z = 2.00
Verification: A @ x = [6. 3. 5.]
Should equal b = [6 3 5]
Difference: 0.00e+00
Using the Inverse Matrix#
Mathematically, the solution is:
Where \(A^{-1}\) is the inverse of \(A\). However, don’t compute the inverse explicitly in practice - np.linalg.solve() is faster and more numerically stable.
A = np.array([[2, 3],
[1, -1]])
b = np.array([8, 1])
# Using inverse (not recommended)
A_inv = np.linalg.inv(A)
x_inverse = A_inv @ b
# Using solve (recommended)
x_solve = np.linalg.solve(A, b)
print("Using inverse:")
print(f"x = {x_inverse}")
print("\nUsing solve:")
print(f"x = {x_solve}")
print("\nBoth give the same answer, but solve() is better!")
Using inverse:
x = [2.2 1.2]
Using solve:
x = [2.2 1.2]
Both give the same answer, but solve() is better!
When There’s No Solution#
If the system has no solution (parallel lines that don’t intersect), the matrix is singular (not invertible):
# Parallel lines: no intersection
A = np.array([[2, 4],
[1, 2]]) # Second row is half of first row
b = np.array([8, 5]) # Inconsistent right-hand side
try:
x = np.linalg.solve(A, b)
print(f"Solution: {x}")
except np.linalg.LinAlgError as e:
print(f"Error: {e}")
print("\nThe system has no solution - the lines are parallel!")
# Check if matrix is singular
det = np.linalg.det(A)
print(f"\nDeterminant of A: {det:.2e}")
print("Determinant is zero => matrix is singular")
Error: Singular matrix
The system has no solution - the lines are parallel!
Determinant of A: 0.00e+00
Determinant is zero => matrix is singular
Overdetermined Systems#
Sometimes you have more equations than unknowns (e.g., 3 equations, 2 unknowns). This is an overdetermined system and typically has no exact solution.
For these cases, use Least Squares: Finding the Best Fit to find the best approximate solution.
Real-World Example: Circuit Analysis#
Solving for currents in an electrical circuit using Kirchhoff’s laws:
# Circuit equations in matrix form
A = np.array([[1, 1, -1],
[10, 5, 0],
[0, 5, 20]])
b = np.array([0, 15, 25])
I = np.linalg.solve(A, b)
print("Circuit Currents:")
print(f"I1 = {I[0]:.3f} A")
print(f"I2 = {I[1]:.3f} A")
print(f"I3 = {I[2]:.3f} A")
Circuit Currents:
I1 = 1.667 A
I2 = -0.333 A
I3 = 1.333 A
Summary#
Systems of linear equations can be written as \(A\mathbf{x} = \mathbf{b}\)
Use
np.linalg.solve(A, b)to find the solutionThe solution is where all equations (lines/planes) intersect
If no solution exists, the matrix is singular (determinant = 0)
For overdetermined systems, use least squares instead
Next Steps#
When exact solutions don’t exist, we can still find the best approximate solution using Least Squares: Finding the Best Fit.